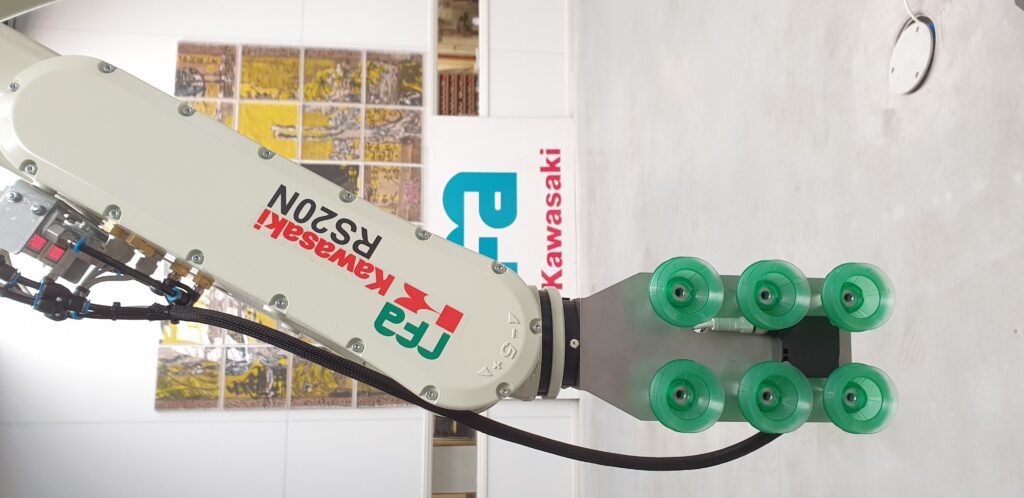
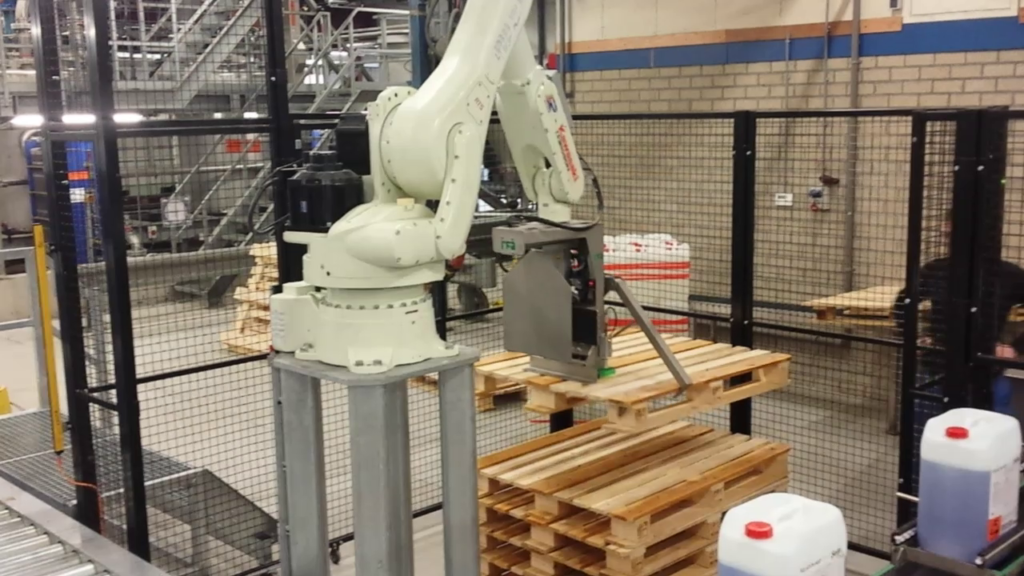
RFA heeft een supersnelle compacte robotde-palletiser ontwikkeld op basis van de Kawasaki RS020NFE91 robot. Deze snelle robot kan cans tot 20 kg tot een hoogte van 2100 mm van een pallet afstapelen. De robot wordt snel en gemakkelijk geprogrammeerd met RFA’s bedieningsvriendelijke PatEdit palletiseersoftware. Doordat de compacte Kawasaki RS020N robot wordt toegepast is de investering aanmerkelijk lager en het benodigde vloeroppervlak kleiner dan bij de grotere robots.