
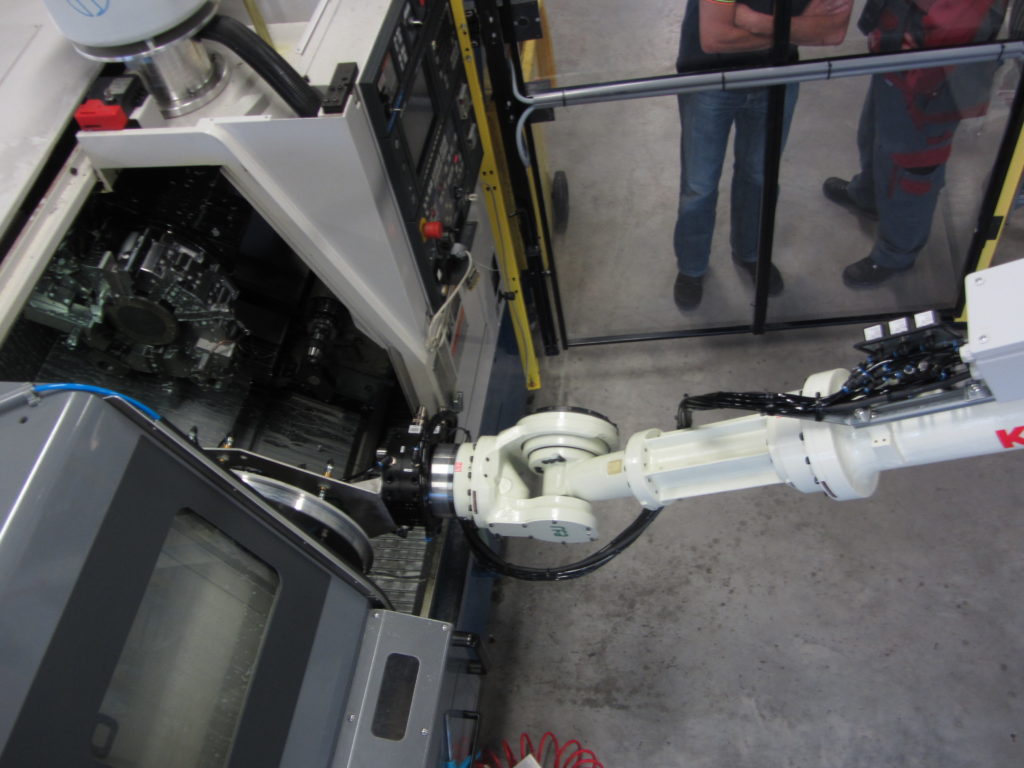
– De robot belaadt een draaibank en een freesmachine
– De robot pakt de werkstukken uit magazijnen
– De werkstukken centreren in een uitrichtstation
– Bewerkte werkstukken hangt de robot in een ophangrek of in een magazijn
– De robot werpt het afval in een bak



