
– Losse werkstukken liggen op de transportband
– RFA-Vision herkent en lokaliseert de werkstukken
– Door dubbele grijper snelle wissel in de machine
– Spanen wegblazen met perslucht uit de robotgrijper
– De compacte besturing staat onde de transportband
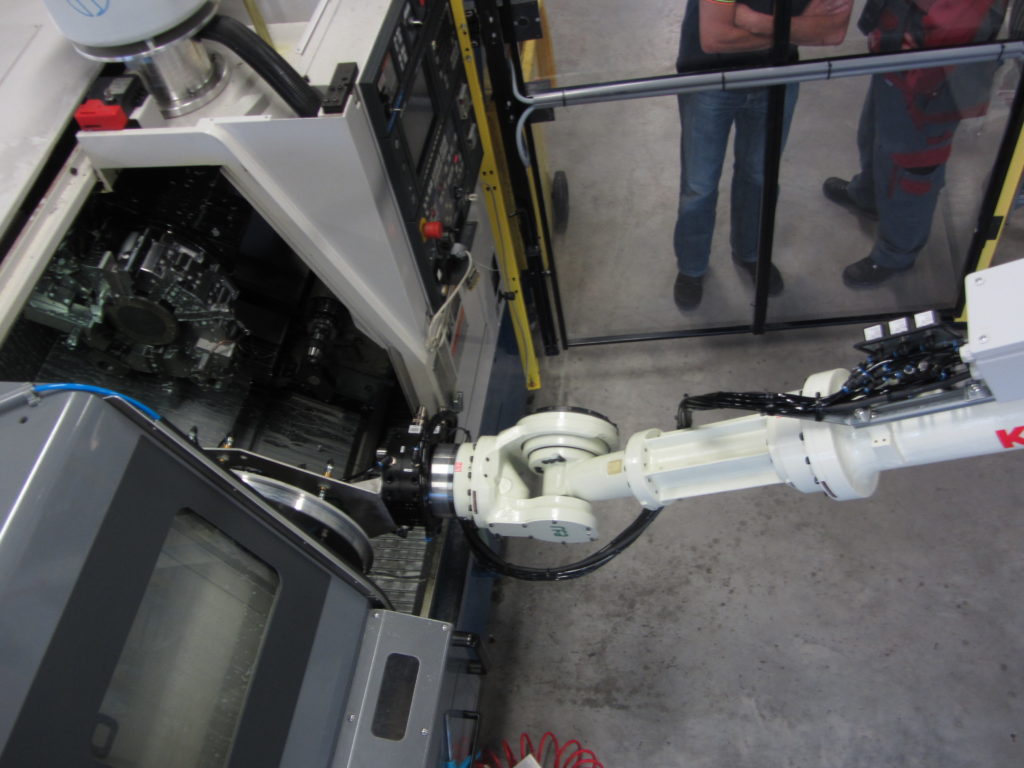
Kawasaki FS010E belaadt 2 Miyano draaibanken
– RFA-Vision zorgt voor herkenning van de werkstukken
– 1 robot werkt met 2 aan/afvoersystemen
– RFA-Vision analyseert de beelden van 2 camera’s
– De spanen worden weggeblazen met perslucht
Kawasaki FS006L belaadt een Haas super VF2

– Werkstukken liggen zijn op een tafel met raster
– De robot wisselt onbewerkte met bewerkte producten
– De machine wordt beladen door de zijdeur
– De cel is beveiligd door middel van een lichtscherm
Kawasaki ZX130L belaadt een Mori Seiki en een DMG
– De robot belaadt een draaibank en een freesmachine
– De robot pakt de werkstukken uit magazijnen
– De werkstukken centreren in een uitrichtstation
– Bewerkte werkstukken hangt de robot in een ophangrek of in een magazijn
– De robot werpt het afval in een bak
Kawasaki FS045N belaadt twee stuks Mori Seiki SL2

– De robot is op een draaibare galg gemonteerd
– De robot werkt in twee aparte cellen
– Iedere cel heeft een eigen RFA-Vision transportsysteem
– De gerede producten worden in een bak geplaatst
Kawasaki FS010E belaadt een Hartford matrix VMC 560

– De FS010E heeft een payload van 10kg
– Werkstukken liggen op een tafel met raster
– De machine wordt via de zijdeur beladen
– Het systeem is beveiligd met een lichtscherm
– De machine blijft vrij toegankelijk voor handbediening
Kawasaki FS030L belaadt een Hermele C800U
– De robot pakt werkstukken met RFA-Vision van pallet
– De robot zetbewerkte werkstukken op een 2e pallet
– De robot pakt de werkstukken ook van de band
– RFA-Vision localiseert werkstukken op de band
– Toegangsbeveiliging door middel van een lichtscherm
– De robot en de machine produceren onbemand
Kawasaki FS006L belaadt een Okuma LB200M
– Assen worden in een rek aangevoerd
– Het systeem is eenvoudig in te stellen
– Compacte opstelling minimaliseert benodigde ruimte
– Een ompakstation helpt bij de juiste positionering
– Spanen worden weggeblazen met perslucht
Kawasaki FS010E belaadt een Matsuura

– De robot belaadt de machine via de zijkant
– Werkstukken liggen op een tafel met raster
– De robot stuurt de machineklem aan
– Eenvoudig wisselen tussen werkstukken
– Spanen wegblazen met perslucht uit de robotgrijper
Kawasaki FS006N belaadt een Mazak VTC200
– De FS006N is een compacte robot
– De ‘slanke’ robot is binnenin de machine geplaatst
– Producten worden van buiten de machine aangevoerd
– RFA-Vision herkent de producten op de transportband
– Spanen wegblazen met perslucht uit de robotgrijper