
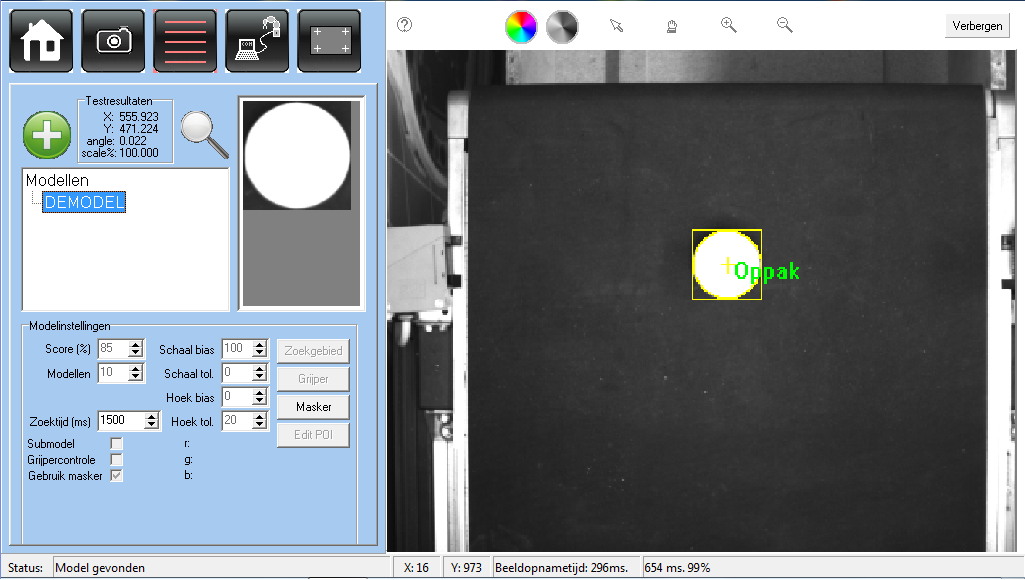
Met het RFA Vision-programma is het mogelijk om in een handomdraai een vision toepassing te programmeren voor de industriële Kawasaki robots die de ethernetfuncties ondersteunen. Omdat het programma op een PC draait wordt er een zeer korte herkenningstijd behaald, onder alle omstandigheden. Versie 5.0 is speciaal ontworpen om te werken op een Tablet PC met Touch Screen, zoals een Microsoft Surface. Het is natuurlijk ook mogelijk om RFA-Vision op een desktop PC te draaien.
Het RFA-Vision systeem wordt ingezet voor onder andere de volgende toepassingen:
– positie bepalen voor het oppakken van werkstukken ( bv. RFA-Vision Robotloader )
– herkennen en sorteren van werkstukken
– controle aanwezigheid van een werkstukeigenschap
– correcties en controle van oriëntatie van werkstukken
Omdat RFA de software in eigen huis ontwikkelt kunnen uiteenlopende toepassingen mogelijk gemaakt worden.
Het systeem maakt gebruik van Gig-E camera’s met power over ethernet en is in staat gegevens van meerdere camera’s te verwerken. Er kan bijvoorbeeld van meerdere aanvoerbanden opgepakt worden of met een 2e camera (met macro lens) een detail gecontroleerd worden.
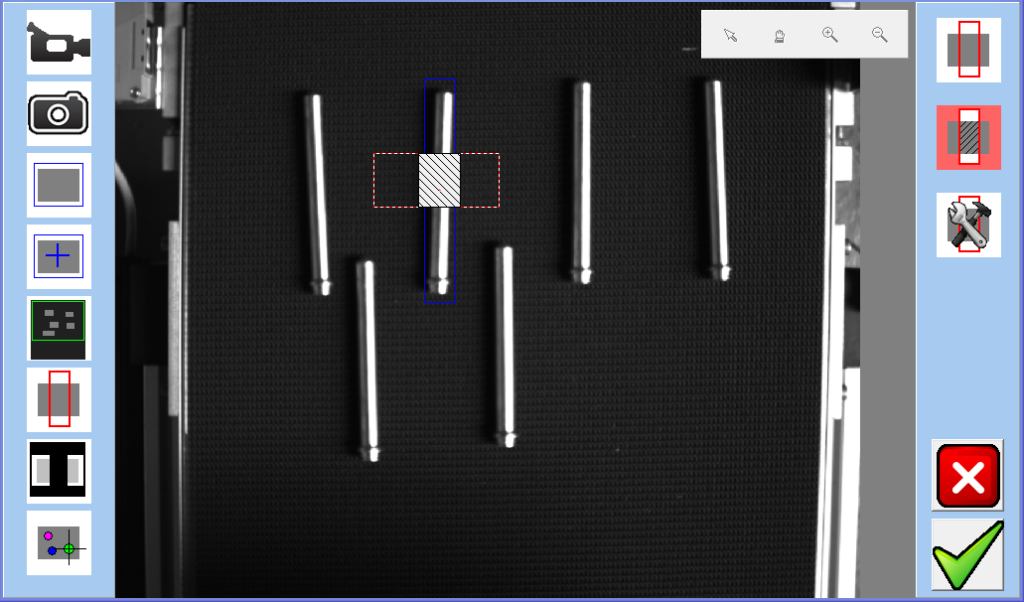
Een speerpunt voor alle RFA software en dus ook het RFA-Vision systeem is de intuïtieve bediening. Met duidelijke, Nederlandstalige schermen wordt een te herkennen werkstuk eenvoudig ingesteld. Het systeem herkent vervolgens de werkstukken automatisch, bepaalt de coördinaten en verzendt deze naar de robot.