
– Werkstukken liggen zijn op een tafel met raster
– De robot wisselt onbewerkte met bewerkte producten
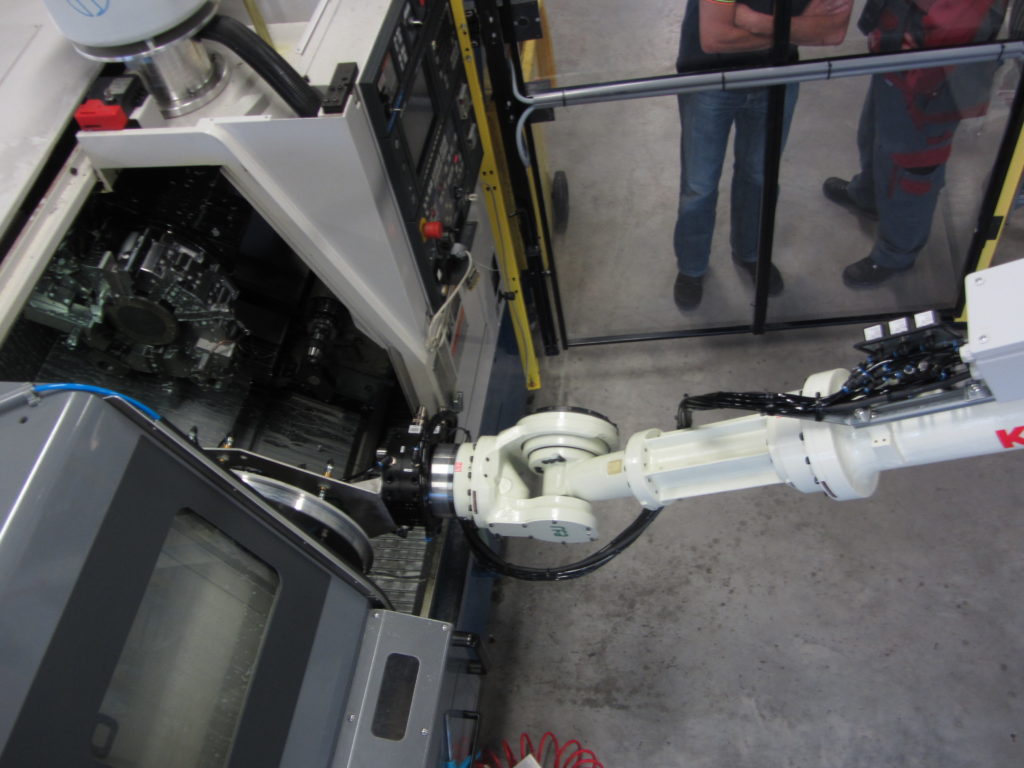
– De machine wordt beladen door de zijdeur
– De cel is beveiligd door middel van een lichtscherm

Rijlaarsdam Factory Automation B.V.
innovatieve en vindingrijke partner voor robotisering
– Werkstukken liggen zijn op een tafel met raster
– De robot wisselt onbewerkte met bewerkte producten
– De machine wordt beladen door de zijdeur
– De cel is beveiligd door middel van een lichtscherm
– De robot belaadt een draaibank en een freesmachine
– De robot pakt de werkstukken uit magazijnen
– De werkstukken centreren in een uitrichtstation
– Bewerkte werkstukken hangt de robot in een ophangrek of in een magazijn
– De robot werpt het afval in een bak

– De FS010E heeft een payload van 10kg
– Werkstukken liggen op een tafel met raster
– De machine wordt via de zijdeur beladen
– Het systeem is beveiligd met een lichtscherm
– De machine blijft vrij toegankelijk voor handbediening
– De robot pakt werkstukken met RFA-Vision van pallet
– De robot zetbewerkte werkstukken op een 2e pallet
– De robot pakt de werkstukken ook van de band
– RFA-Vision localiseert werkstukken op de band
– Toegangsbeveiliging door middel van een lichtscherm
– De robot en de machine produceren onbemand

– De robot belaadt de machine via de zijkant
– Werkstukken liggen op een tafel met raster
– De robot stuurt de machineklem aan
– Eenvoudig wisselen tussen werkstukken
– Spanen wegblazen met perslucht uit de robotgrijper
– De FS006N is een compacte robot
– De ‘slanke’ robot is binnenin de machine geplaatst
– Producten worden van buiten de machine aangevoerd
– RFA-Vision herkent de producten op de transportband
– Spanen wegblazen met perslucht uit de robotgrijper
– De robot hanteert kunststof werkstukken
– De grijpers hebben verstelbare bekken
– De dubbele transportband is ergonomisch in gebruik
– RFA-Vision detecteert de werkstukken
– De FS030L is een robot met 30 kg payload
– 2 transportsystemen met RFA-Vision voor aanvoer
– Met dubbele grijper wisselt de robot snel
– Spanen wegblazen met perslucht uit de robotgrijper

– Werkstukken worden aangevoerd op transportband
– Met RFA-Vision worden de werkstukken gelokaliseerd
– Spanen wegblazen met perslucht uit de robotgrijper
– Met dubbele grijper snel werkstukken wisselen
– Platen worden met een vacuümgrijper gepakt
– De positie van de platen wordt gemeten met sensoren
– De robot legt de platen tegen de aanslagen
– Platen worden direct van de pallet gepakt
– De robot palletiseert de greesde platen