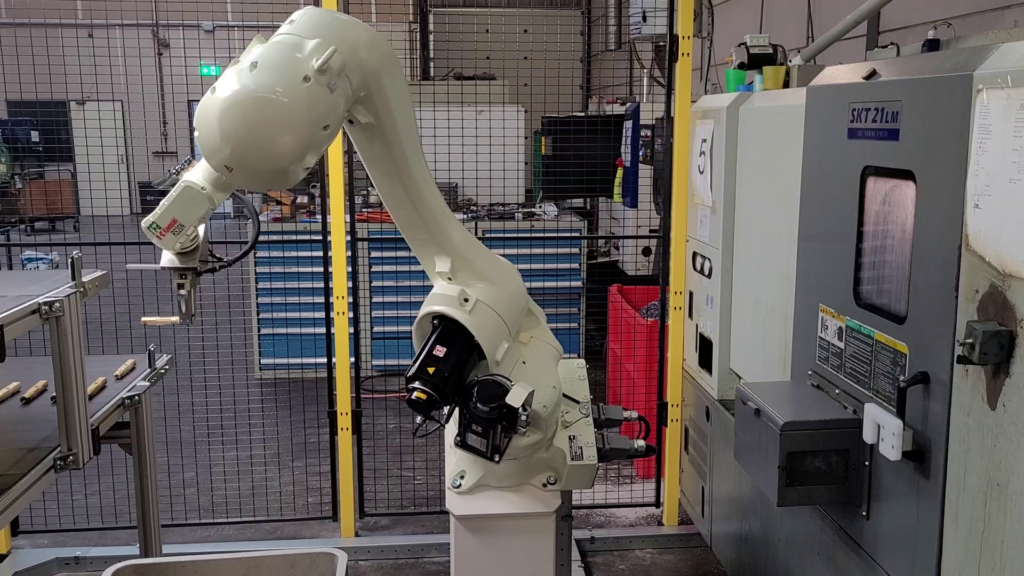
De door RFA B.V. geleverde Kawasaki RS020NFE91 Robotloader met RFA-Vision belaadt een Hyundai Kia SK21LM draaibank bij Odin Verbindingstechnieken B.V., de fabrikant van het welbekende merk Hasmi propaangereedschap.
De beladingsrobot pakt de onbewerkte werkstukken van een transportband, waarboven de Gig-E camera van het RFA-Vision systeem is gemonteerd. Het RFA-Vision systeem geeft de coördinaten van de werkstukken, die door de operator willekeurig op de transportband gelegd zijn, door aan de robotbesturing.
Nadat de robot een werkstuk heeft opgepakt van de transportband, controleert hij de aanwezigheid van het werkstuk in de grijper door het bij een sensor, die aan het frame van de transportband is gemonteerd, te houden.
Het dubbele aanvoersysteem is uitgevoerd met 2 boven elkaar gemonteerde aangedreven transportbanden met 2 Gig-E camera’s, zodat er een groot aantal onbewerkte werkstukken kunnen worden aangevoerd en de robot een lange tijd de draaibank onbemand kan beladen.
De robot bedient de machinedeur door een haak, die aan de grijper is gemonteerd, in een oog van de machinedeur te steken en zodat de robot de deur open en dicht kan schuiven.
Nadat de draaibewerking is voltooid verwisselt de robot het bewerkte werkstuk, dankzij de dubbele grijper aan de robotpols, snel door een onbewerkt werkstuk.
De robot legt het bewerkte werkstuk in een kunststof bak.
Het RFA-Vision systeem draait op een tablet-pc, hierop kan de operator dankzij RFA’s bedieningsvriendelijke menugestuurde intuïtieve software gemakkelijk en snel het RFA-Vision systeem instellen voor een nieuw werkstuk.

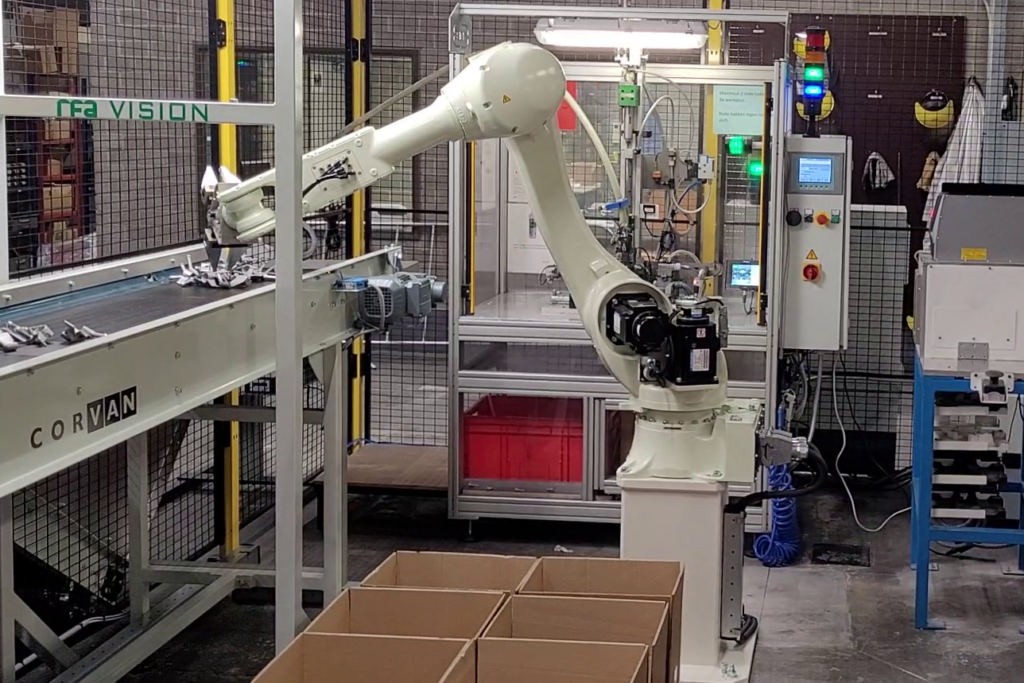
RFA Vision Robotloader Kawasaki RS020NFE91 voor Pedeo N V
RFA heeft deze Kawasaki RS020NFE91 robot uitgerust met het RFA-Vision systeem. Hiermee kan de robotbelader de ongeoriënteerde werkstukken van de transportband pakken. De spuitgiet werkstukken worden door de beladingsrobot van de band gepakt en dan in een schroefmachine, die er boutjes inzet, gelegd. Hierna pakt de robot de werkstukken uit deze machine en plaatst ze in de aanvoerlade van een lasergraveermachine, die er een QR code op aanbrengt. Nadat de laserbewerking is voltooid, pakt de robot het werkstuk op en plaatst het in een kartonnen doos. De robot is uitgerust met een dubbele grijper zodat het uitnemen van een bewerkt product en het plaatsen van een te bewerken werkstuk zo snel mogelijk wordt uitgevoerd. De te bewerken werkstukken worden los een een bak gestort, vanwaar ze door een opvoerband naar de transportband worden gebracht, waarboven de Gig-E camera van het RFA-Vision systeem is gemonteerd.