
– De robot heeft een grijperwisselsysteem
– Robot CX210L: 6 assen, 210 kg, reach Ø 5.398 mm
– Er is een palletgrijper en een dubbele werkstukgrijper
– De robot pakt de pallets uit het magazijn
– De robot pakt de werkstukken van een rasterplaat
– De robotbesturing is onder de werkbank gemonteerd
– De RFA-Raster en RFA-Pallet software draait op een
tablet-pc, voor optimaal bedieningsgemak
– De robot blaast de klem en het werkstuk schoon
– De operator wisselt de pallets veilig in 2 sluizen
– De robot koppelt de perslucht aan de klem voor het
openen tijdens het wisselen van het werkstuk
– De robot is beveiligd met 1 lichtscherm en hekken
Kawasaki RS20N met RFA-Raster bij DMG-Mori
– De RFA-Robotloader RS020N heeft een dubbele grijper
– De robot pakt de werkstukken van een rasterplaat
– De robotbesturing is onder de werkbank gemonteerd
– De RFA-Raster software draait op een tablet-pc,
voor optimaal bedieningsgemak
– De robot blaast de klem en het werkstuk schoon
– De robot opent en sluit de machinedeur automatisch
– De robot koppelt de perslucht aan de klem voor het
openen tijdens het wisselen van het werkstuk
– De robotcel wordt aan 3 zijden afgeschermd door 1
lichtscherm met 2 afbuigspiegels
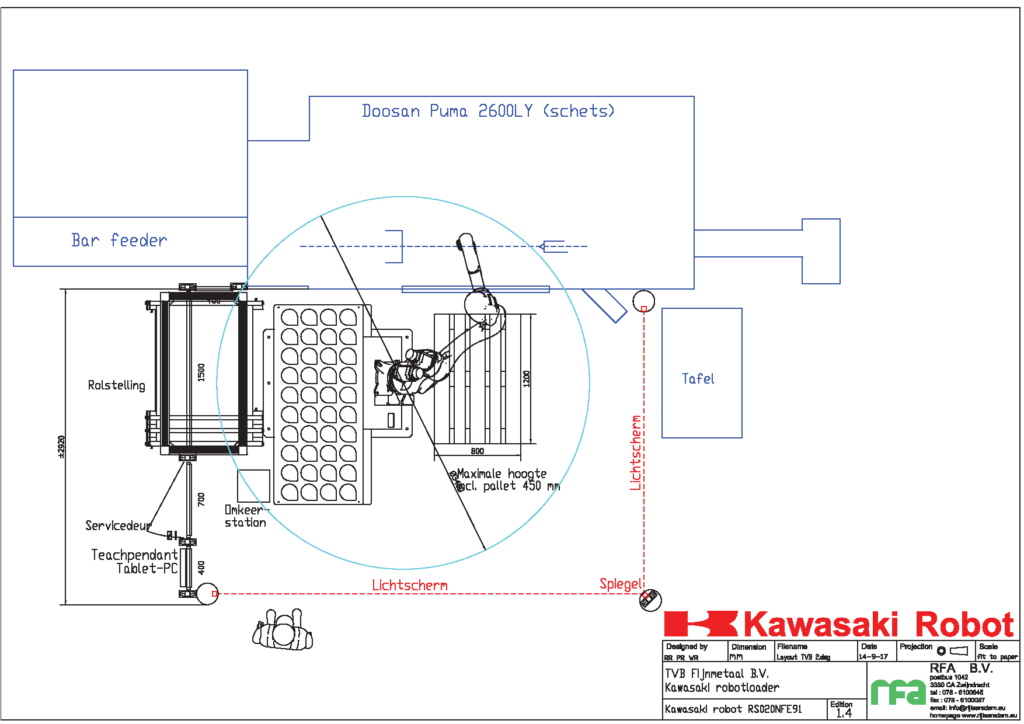
Kawasaki RS020N RFA-Raster bij Doosan Puma 2600LY
– De RFA-Robotloader RS020N belaadt werkstukken van een rasterplaat op een tafel
– Assen liggen in een doorrolmagazijn, dat van buiten de robotcel gevuld en geleegd kan worden.
– Snel omstellen met RFA-Raster software op tablet-pc
– De robot is onder 45° op een sokkel gemonteerd
– De robot staat naast de deur van de draaibank,
hierdoor is de draaibank volledig vrij toegankelijk
– Aan 2 zijden lichtschermen, voor optimale toegang
– Klein vloeroppervlak benodigd
Kawasaki RS20N met RFA-Raster bij Haas UMC750
– De RFA-Robotloader RS020N heeft een dubbele grijper
– De robot pakt de werkstukken van een rasterplaat
– De robtbesturing is onder de werkbank gemonteerd
– De RFA-Raster software draait op een tablet-pc,
voor optimaal bedieningsgemak
– De robot blaast de klem en het werkstuk schoon
– De robot is op een zeer klein oppervlak gemonteerd
– De robotcel wordt aan afgeschermd door 2
lichtschermen en met veiligheidshekken.
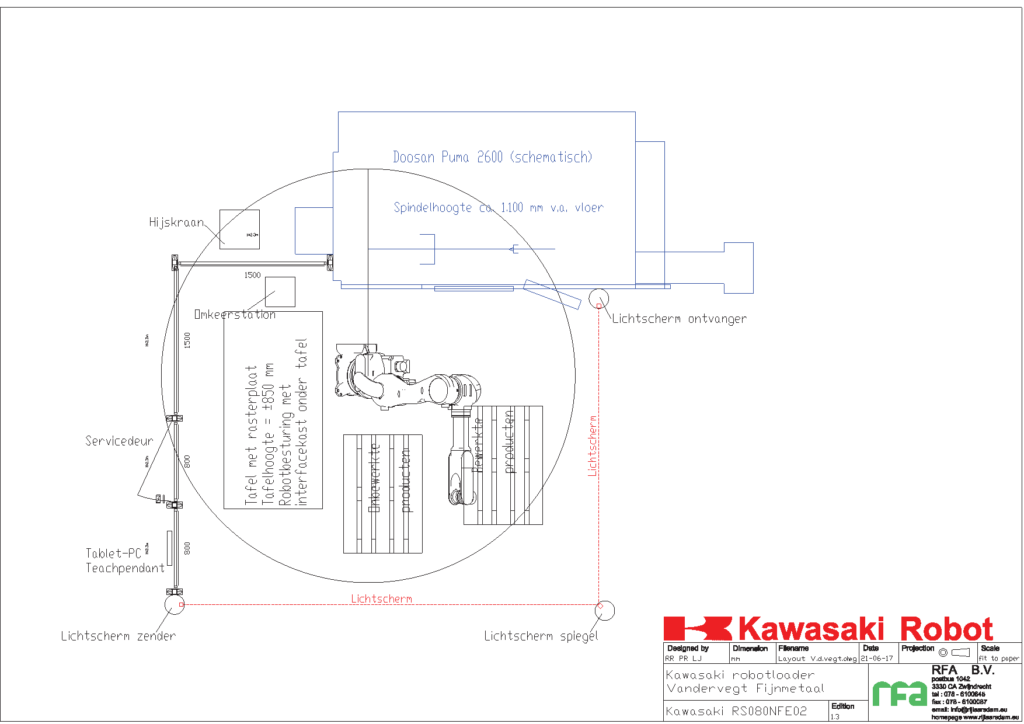
Kawasaki RS080N met RFA-Raster bij Doosan Puma 2600
– Werkstukken liggen in een rasterplaat op een tafel
– Werkstukken liggen ook op een europallet op de vloer
– Snel omstellen met RFA-Raster software op tablet-pc
– De robot is onder 45° op een sokkel gemonteerd
– De robot staat naast de deur van de draaibank,
hierdoor is de draaibank volledig vrij toegankelijk
– Aan 2 zijden lichtschermen, voor optimale toegang
– Klein vloeroppervlak benodigd
Kawasaki RS20N met RFA-Vision bij Mazak
– De robot heeft een viervoudige grijper
– De robot pakt 2 aluminium deurschilden uit de kist
– De robot houdt de 2 deurschilden onder de camera
– RFA-Vision bepaalt de positie van de referentiegaten.
– De RFA-Vision software draait op een tablet-pc,
voor optimaal bedieningsgemak
– De robot blaast de klem en het werkstuk schoon
– De robot verwisselt de 2 werkstukken in de 2 klemmen
– De referentiegaten van de deurschilden worden door de
robot op pennen van de opspanning gedrukt
– De robot legt de bewerkte deurschilden in de andere kist
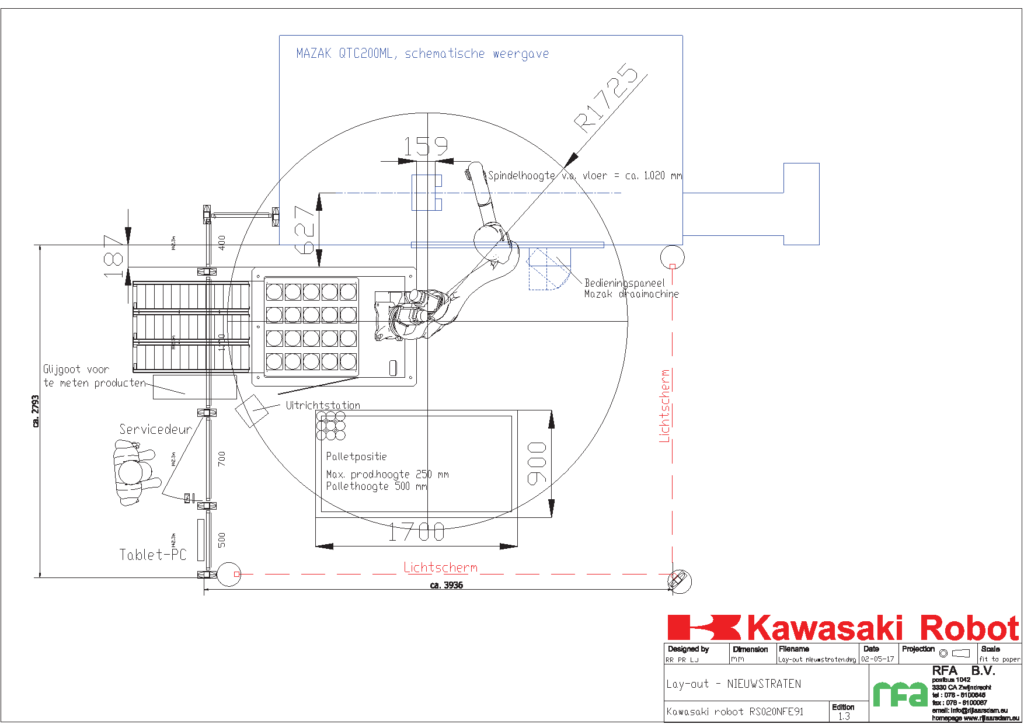
Kawasaki RS020N met RFA-Raster bij Mazak QTC200ML
– Werkstukken liggen in een rasterplaat op de console
– Werkstukken liggen ook in een verrijdbaar magazijn
– Assen liggen in een doorrolstelling
– De doorrolstelling wordt buiten de robotcel geladen
– Snel omstellen met RFA-Raster software op tablet-pc
– De robot staat onder 45° op de console gemonteerd
– De robot staat naast de deur van de draaibank,
hierdoor is de draaibank volledig vrij toegankelijk
– Aan 2 zijden lichtschermen, voor optimale toegang
– Klein vloeroppervlak benodigd
Kawasaki RS20N met RFA-Raster bij Hermle
– De robot heeft een dubbele grijper
– De RFA-Raster software draait op een tablet-pc,
voor optimaal bedieningsgemak
– De robot staat naast de machinedeur met vrije toegang
– De robot pakt een onbewerkt werkstuk van de
rasterplaat op de console waarop ook de robot staat
– Na het frezen opent de deur van de machine
– De robot blaast de klem en het werkstuk schoon
– De robot pakt het bewerkte werkstuk uit de klem
– De robot plaatst de onbewerkte werkstuk in de klem
– De robot beweegt uit de machine en legt het gerede
werkstuk op de rasterplaat
Kawasaki RS003N met RFA-Raster bij Hwacheon

– Werkstukken liggen in een rasterplaat op de console
– Bij het omstellen van de draaibank wordt de robot
handmatig opzij geschoven.
– De robot hanteert ook een stofzuiger om de spanen te
verwijderen, tijdens onbemande productie.
– Tijdens het draaien van kunststof onderdelen beweegt
de robot de zuigmond van de stofzuiger synchroon
met de draaibank.
Kawasaki RS20N met RFA-Raster bij Haas UMC750
– De robot heeft een klemgrijper
– De robot staat naast de machinedeur met vrije toegang
– De robot pakt een onbewerkt werkstuk van de
rasterplaat op de console waarop ook de robot staat
– Na het frezen opent de deur van de machine
– De robot blaast de klem en het werkstuk schoon
– De robot pakt het bewerkte werkstuk uit de klem
– De robot plaatst de onbewerkte werkstuk in de klem
– De robot beweegt uit de machine en legt het gerede
werkstuk op de rasterplaat