
De nieuwe snelle Kawasaki CP180L robotpalletiser is zeer geschikt voor het palletiseren van zakken, vooral als er een hoge capaciteit nodig is. Doordat de robot 2 geforceerd gekoelde motoren op de 1e as heeft, is deze robot in staat om zeer korte cyclustijden te realiseren. RFA heeft de afgebeelde zakkengrijper ontworpen. De breedte van de grijper wordt automatisch door een geïntegreerd bestuurde servomotor versteld, zodat zakken met verschillende afmetingen feilloos worden opgepakt en neergelegd op de pallet. Tussenvellen en tussenkartons worden opgepakt met 4 vacuümcups, die aan telescopische pneumatische cilinders zijn bevestigd. De robot meet met een aan de grijper gemonteerde lasersensor de exacte hoogte van de pallet en de palletlading. Het robotprogramma past automatisch het bewegingspatroon aan, zodat de tussenvellen en de zakken op de juiste hoogte worden geplaatst. De robot is geprogrammeerd met RFA’s PatEdit palletiseersoftware. Operators kunnen zonder speciale programmeerkennis eenvoudig en snel stapelpatronen maken en naar de robot sturen via de ethernetpoort van de robotbesturing.
25 kg zakken met pp granulaat depalletiseren
De robot meet eerst de positie van de zakken door sensoren, die in de grijper gemonteerd zijn, over de palletlading te bewegen. Dan pakt de robot de zakken stuk voor stuk van de pallet. De robot brengt de zak naar een roterend mes, waar de zak wordt opengesneden. De pp korrels vallen in een hopper en worden afgevoerd. De robot legt de lege zak in een container.
25 kg zakken met boombast palletiseren

De robot grijpt zakken van een rollenbaan met vierkante rollen. De vingers van de grijper vallen tussen de rollen. De grijper beschikt over twee sets vingers. Een set grijpt de zak, de andere begeleidt de zak recht naar beneden tijdens het vallen. De grijper is automatisch verstelbaar voor verschillende zakmaten. Een Kawasaki servomotor met encoder beweegt de handen tot de gewenste maat is bereikt.
Zakken grind palletiseren
De robot neemt zakken grind van een rollenbaan. De zakken worden op de horizontale sluisdeuren van een palletlift gelegd. Programmeerbare schuifbalken drukken een laag met zakken samen. Hierna openen de sluisdeuren en zakt de laag op de pallet. Met deze methode worden perfecte rechte stapels gemaakt ook met moeilijke producten zoals grind, aardappelen etc.
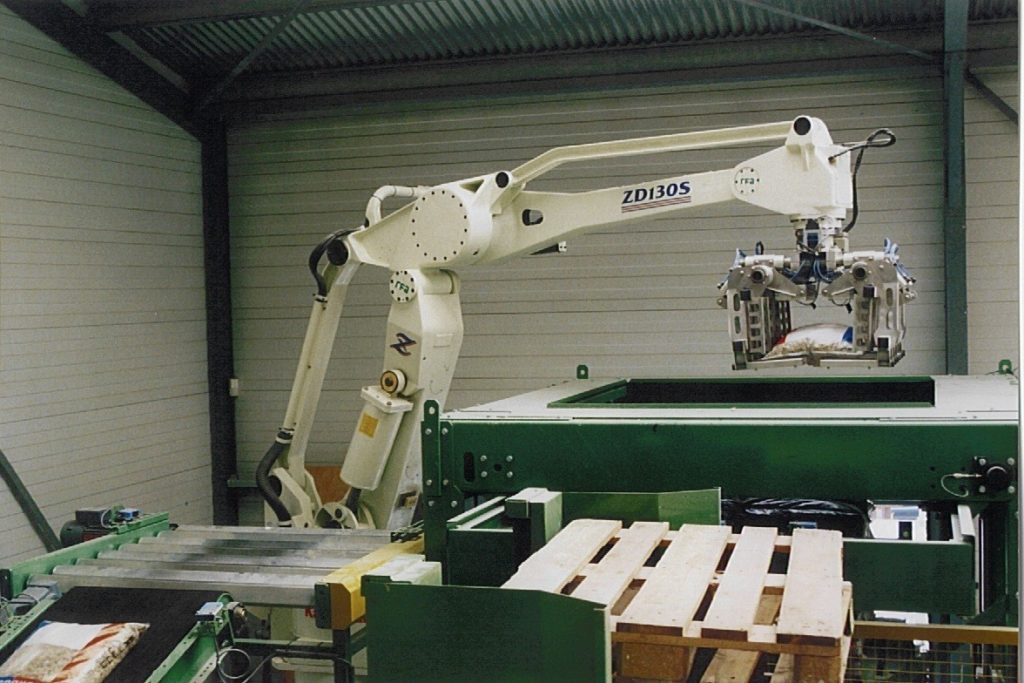
Geperste balen zaagsel palletiseren

De robot is uitgerust met een vacuümgrijper met een vacuümpomp. De balen zaagsel worden van een transportband gepakt en op verschillende posities gepalletiseerd.
Kratten depalletiseren, vullen en palletiseren
De robot legt de werkstukken in de krat. De robot plaatst ook een karton op de werkstukken in de krat. Na het vullen stapelt de robot de volle kratten op een pallet.
200 liter vaten palletiseren met Kawasaki CP500 robot
De nieuwe Kawasaki CP500 heavy duty robotpalletiser, met een hanteringscapaciteit van 500 kg., wordt ingezet voor het palletiseren van 200 liter vaten en het hanteren van lege CP9 pallets.RFA heeft een hiervoor een grijper ontwikkeld waarmee de vaten aan de randen geklemd worden met 2 papagaaienbekken. De lege CP9 pallets worden met 2 pneumatische aangedreven rvs spreidarmen geklemd. De robot vindt de exacte positie van de lege CP9 pallet op de stapel met behulp van een lasersensor, die aan de grijper is gemonteerd. De robot palletiseert vaten van meerdere vullijnen. De robot kan meerdere lagen met vaten op 1 pallet stapelen, waarbij de robot een tussenpallet tussen de lagen plaatst.
200-250 liter vaten palletiseren met Kawasaki MD400 robot

De Kawasaki MD400 robotpalletiser heeft een hanteringcapaciteit van 400 kg. De robot is geïntegreerd in een vullijn voor 200 en 250 litervaten met o.a. thinner. Er zijn 3 aanvoerbanen naar de robot. De robot grijpt 1 vat van een rollenbaan. Hiervoor is de robot uitgerust met een grijper met papegaaienbekken. De robot zet de vaten op de pallets. De pallets worden met een heftruck weggenomen.
Bekers in trays plaatsen en trays palletiseren
De bekers worden op de dynamische bufferband geformeerd door 2 servo gestuurde schuifarmen. De robot pakt de bekers en plaatst deze in de trays. De robot pakt de trays met de bekers en stapelt deze op de pallet. De robot plaatst tussenvellen en pakt ook lege pallets De volle pallets worden over een rollenbaan afgevoerd. De trays worden automatisch gevouwen door een tray opzetter.
Jerrycans stapelen met een Kawasaki ZD130S robot palletiser
| De Kawasaki ZD130S robot palletiser heeft een hanteringcapaciteit van 130kg. De robot is geïntegreerd in 2 vullijnen voor 20 en 30 liter jerrycans met o.a. zoutzuur. Er zijn 2×2 aanvoerbanen naar de robot. De robot grijpt 1 stuks 30L jerrycan of 2 stuks 20L jerrycans van 4 kettingbanen. Hiervoor is de robot uitgerust met een dragende klemgrijper. De robot plaatst de jerrycans op de pallets. De lege pallets worden door de robot afgestapeld en op de palletiseerpositie gelegd. De beladen pallets worden van de 2 palletiseerposities via haakse overzetters op 1 afvoerbaan naar de wikkelaar getransporteerd. | |