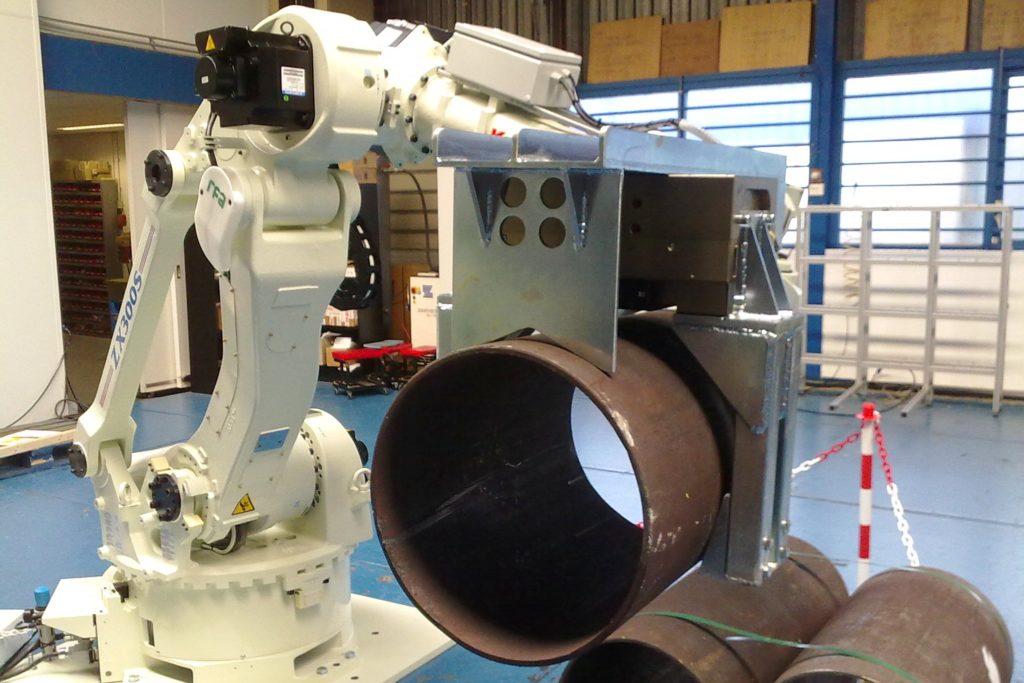
De 6-assige Kawasaki ZX300 heavy duty robot hanteert buizen met een gewicht van 100 kg. De robot meet de lengte en de positie van de buizen met een lasersensor. De robot pakt buizen van verschillende lengtes op van magazijnen en plaatst deze op de doorn van een wikkelmachine voor bandstaal.
De Kawasaki RD080N robot palletiser is uitgerust met een servo gestuurde grijper. De trays worden gedragen door uitschuifbare pennen, die tussen de rollen van de conveyor onder de trays gestoken worden. Doordat de schuifbare draagpennen door een vrijprogrammeerbare servo motor worden aangedreven, is de grijper geschikt om grote en kleine trays te hanteren, zonder dat er omgesteld moet worden. Om de hoge capaciteit te realiseren, pakt de robot meerdere trays tegelijk op van 2 oppakstations. Met deze multifunctionele grijper kan de robot ook lege pallets en tussenvellen oppakken. Het transportsysteem heeft de volgende extra functies: een pusher zorgt voor 2 oppakstations om een buffer te creëren. De trays worden door 2 programmeerbare keerstops 90° gedraaid als dit nodig is voor het stapelpatroon.
De RFA Kawasaki Robotpalletiser is uitgerust met een pneumatisch bediende dragende klemgrijper. Een lift in de rollenbaan tilt de trays op zodat ze met de grijper opgenomen kunnen worden. De grijper fixeert de trays overhoeks en draagt deze met een steun. Er wordt een tussenvel afgerold, gesneden en door de robot op de laag gelegd.
Een Kawasaki FD050N palletiseert kratten. De kratten worden met twee tegelijk gegrepen en op de pallet geplaatst. De robot pakt zelf de lege pallets van de stapel en legt deze op de stapelpositie. Naast het hanteren van pallets en kratten is de grijper ook geschikt voor Amerikaanse vouwdozen van verschillende formaten.
BIC Services heeft de opdracht voor het leveren en sleutelklaar installeren van een Kawasaki CP180L robot palletiser voor het palletiseren van zakken met 25 kg. sojameel gegund aan RFA. De palletiseermachine pakt de zakken met sojameel van een aanvoerband en stapelt deze op een pallet. Vanwege de grote tijdsdruk en de beperkte beschikbare ruimte is gekozen voor een eenvoudige opstelling, waarbij het hanteren van de lege en de beladen pallets met een heftruck wordt uitgevoerd. Door het gebruik van RFA’s palletiseersoftware PatEdit was het eenvoudig om de stapelpatronen zo te maken dat de bolle zijden van zakken op de dunne zijden van de zakken van de vorige laag gelegd worden, zodat er rechte stapels ontstaan.
Voor het geautomatiseerd depalletiseren en legen van zakken van 25 kg. heeft RFA een speciale robotgrijper ontwikkeld en succesvol getest. De Kawasaki CP180L robot pakt met deze multifunctionele grijper niet alleen de zakken, maar ook de lege pallet van de rollenbaan en plaatst deze op een stapel. Met een lasersensor, die in de grijper gemonteerd is, meet de robot de positie van de zakken op de stapel. De robot plaatst de grijper op de zak en 8 robuuste rvs pennen worden door pneumatische cilinders in de zak gedreven. De robot tilt de zak van de pallet en brengt deze naar de messen boven de stortbak. De robot drukt de zak op de messen, de zak scheurt open en de de inhoud valt in de stortbak. Door een speciaal mechanisme wordt de inmiddels geleegde zak gefixeerd in de grijper. De robot werpt de lege zak vervolgens in de afvalcontainer. Het pallettransportsysteem zorgt voor de automatische aanvoer van de pallets met zakken en de lege afvalcontainer en voor de afvoer van de stapels met lege pallets en de afvalcontainer voor lege zakken.
De nieuwe snelle Kawasaki CP180L robotpalletiser is zeer geschikt voor het palletiseren van zakken, vooral als er een hoge capaciteit nodig is. Doordat de robot 2 geforceerd gekoelde motoren op de 1e as heeft, is deze robot in staat om zeer korte cyclustijden te realiseren. RFA heeft de afgebeelde zakkengrijper ontworpen. De breedte van de grijper wordt automatisch door een geïntegreerd bestuurde servomotor versteld, zodat zakken met verschillende afmetingen feilloos worden opgepakt en neergelegd op de pallet. Tussenvellen en tussenkartons worden opgepakt met 4 vacuümcups, die aan telescopische pneumatische cilinders zijn bevestigd. De robot meet met een aan de grijper gemonteerde lasersensor de exacte hoogte van de pallet en de palletlading. Het robotprogramma past automatisch het bewegingspatroon aan, zodat de tussenvellen en de zakken op de juiste hoogte worden geplaatst. De robot is geprogrammeerd met RFA’s PatEdit palletiseersoftware. Operators kunnen zonder speciale programmeerkennis eenvoudig en snel stapelpatronen maken en naar de robot sturen via de ethernetpoort van de robotbesturing.
De robot meet eerst de positie van de zakken door sensoren, die in de grijper gemonteerd zijn, over de palletlading te bewegen. Dan pakt de robot de zakken stuk voor stuk van de pallet. De robot brengt de zak naar een roterend mes, waar de zak wordt opengesneden. De pp korrels vallen in een hopper en worden afgevoerd. De robot legt de lege zak in een container.
De robot grijpt zakken van een rollenbaan met vierkante rollen. De vingers van de grijper vallen tussen de rollen. De grijper beschikt over twee sets vingers. Een set grijpt de zak, de andere begeleidt de zak recht naar beneden tijdens het vallen. De grijper is automatisch verstelbaar voor verschillende zakmaten. Een Kawasaki servomotor met encoder beweegt de handen tot de gewenste maat is bereikt.
De robot neemt zakken grind van een rollenbaan. De zakken worden op de horizontale sluisdeuren van een palletlift gelegd. Programmeerbare schuifbalken drukken een laag met zakken samen. Hierna openen de sluisdeuren en zakt de laag op de pallet. Met deze methode worden perfecte rechte stapels gemaakt ook met moeilijke producten zoals grind, aardappelen etc.