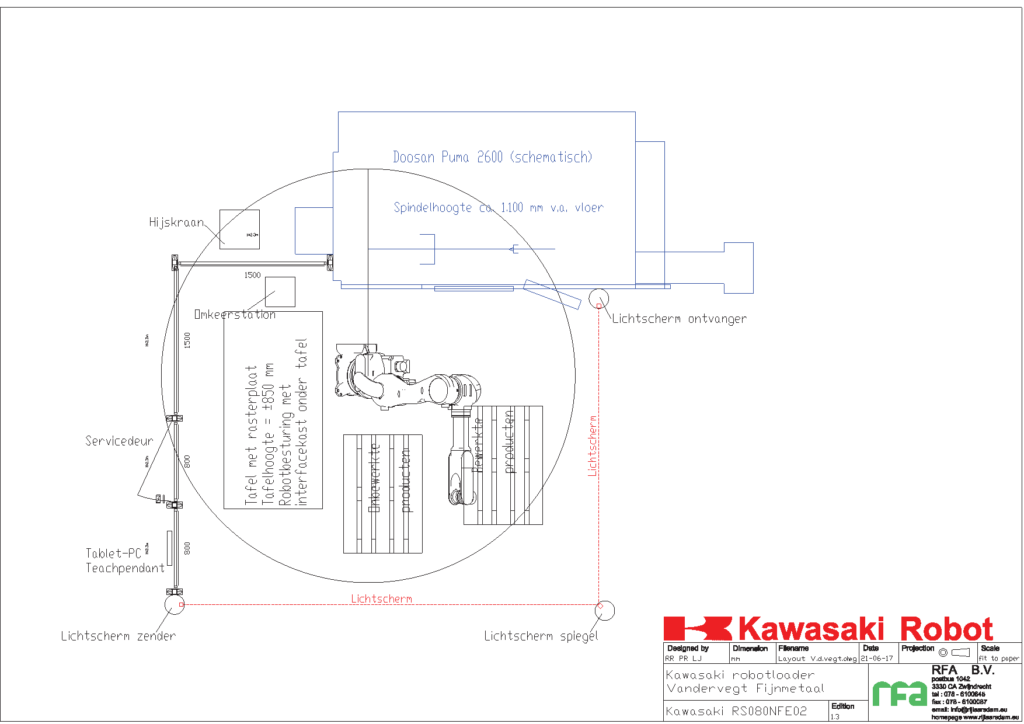
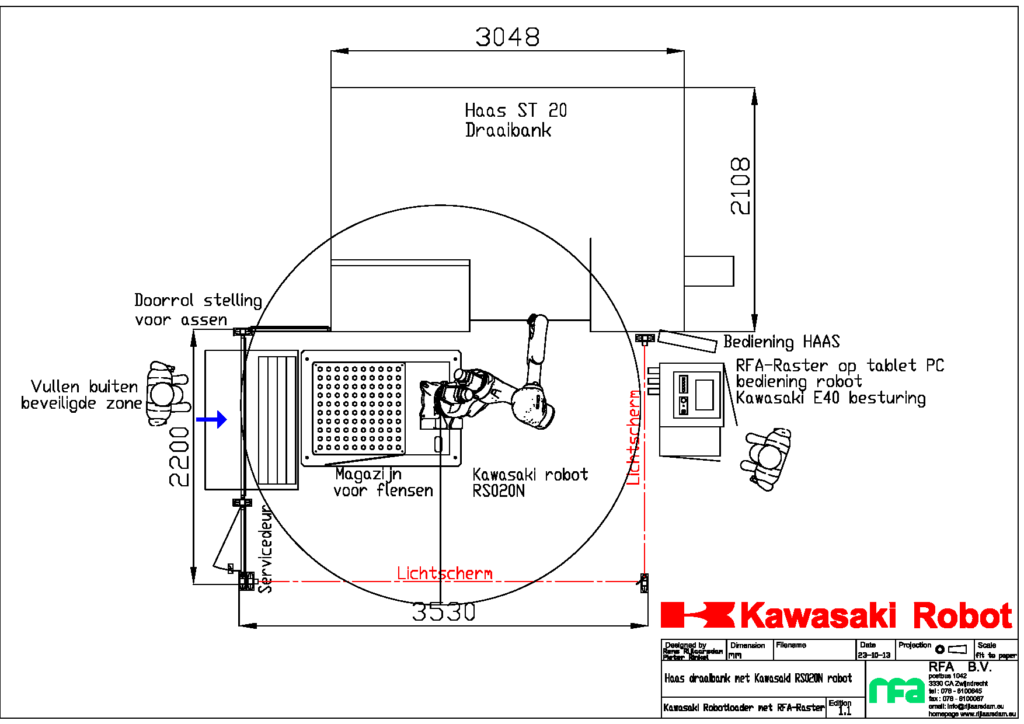
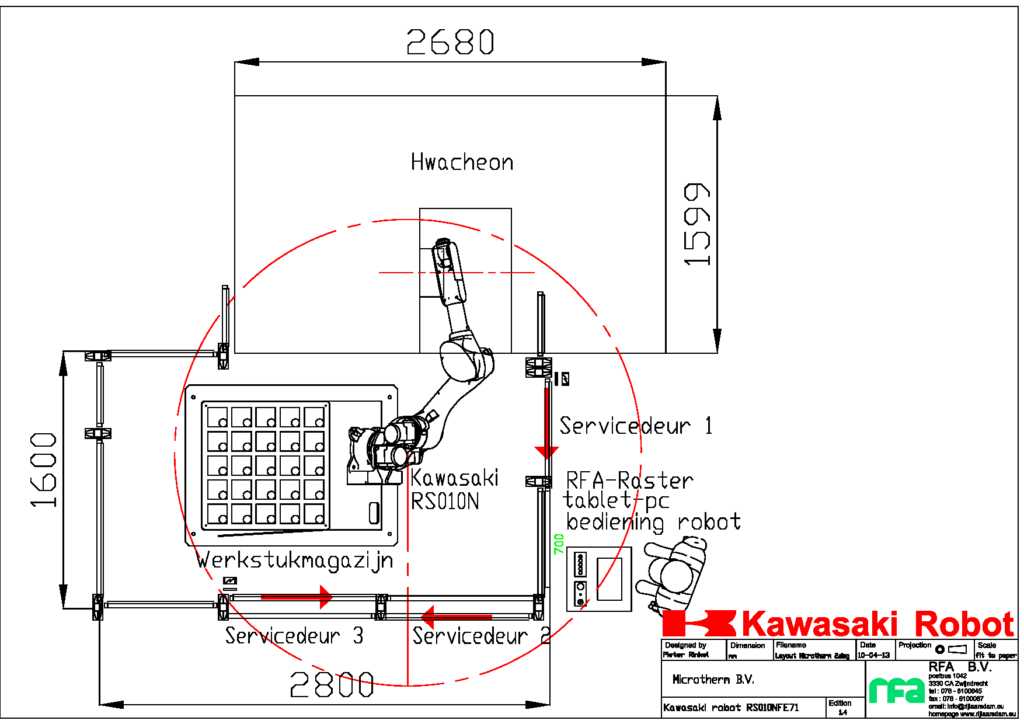
– Werkstukken liggen in een rasterplaat op een tafel
– Werkstukken liggen ook op een europallet op de vloer
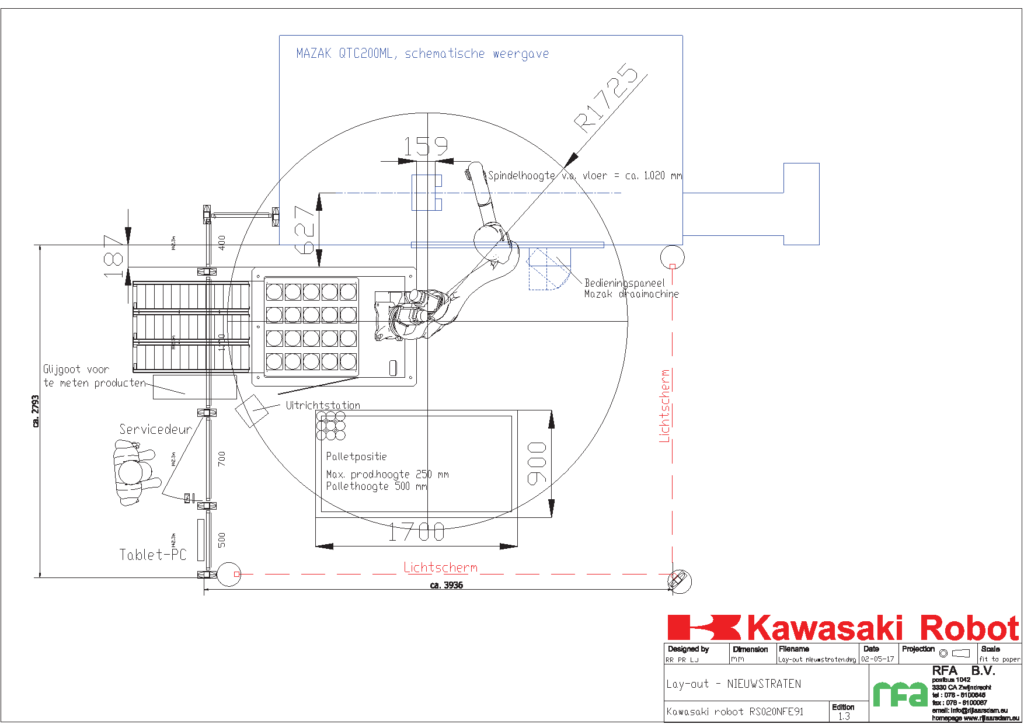
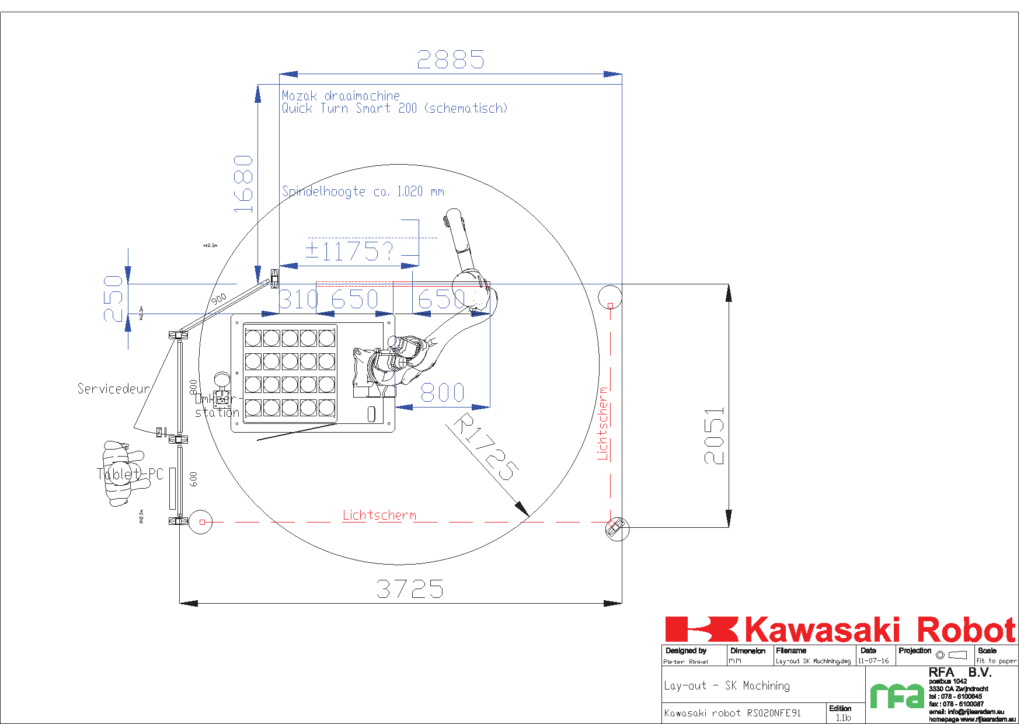
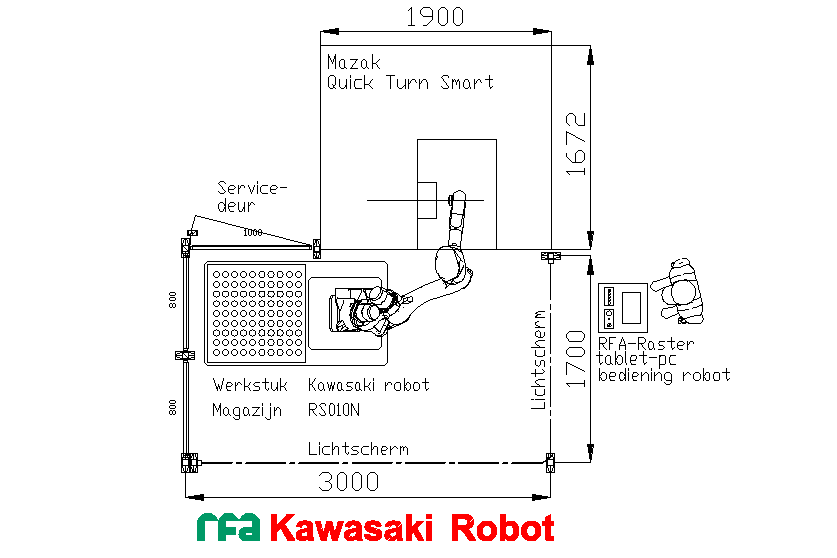
– Snel omstellen met RFA-Raster software op tablet-pc
– De robot is onder 45° op een sokkel gemonteerd
– De robot staat naast de deur van de draaibank,
hierdoor is de draaibank volledig vrij toegankelijk
– Aan 2 zijden lichtschermen, voor optimale toegang
– Klein vloeroppervlak benodigd